时空/动态图神经网络:因子与耦合艺术
前言
在利用深度学习方法处理图结构数据方面,本站文章(图网络浅学:图神经网络及其发展 - GNN)已经做了不少介绍。这些经典的图神经网络方法很好地适应了静态图(Static Graph)的情况——图的结构和特征固定不变,仅在空间上进行模式识别。
然而在很多其他研究中,例如交通流量预测、人类活动轨迹预测等任务,通常需要同时考虑空间依赖性和时间依赖性。也就是说,这类任务建模出来的图结构可能是会随着时间的变化而变化的。这种变化可能是节点或边随着时间的增加与减少,也可能是节点特征和边特征随时间的改变。与静态图对应,这类图结构我们称为动态图(Dynamic Graph),事实上还有诸如时空图(Spatio-temporal Graph)、时空依赖图等术语。这些术语的定义来源于不同的论文、不同的研究者及其相关的不同领域。所以为了统一概念,此后本文都称为动态图,并会继续给出严谨的定义和分类。
那么“动态图的深度学习模型应该如何构建?”、“目前有哪些研究?”就是本篇文章的核心了。
本文的分类结构和部分内容继承自文献《Dynamic Graph Representation Learning with Neural Networks: A Survey》、 《Spatio-Temporal Graph Neural Networks for Predictive Learning in Urban Computing: A Survey》,在此基础上加入了一些个人理解和其他未提及的模型。
图神经网络开发库Pytorch-Geometric 也有对应的时空图扩展:
🧬PyG-Temporal扩展: https://github.com/benedekrozemberczki/pytorch_geometric_temporal
动态化程度
Dynamic Graph: A dynamic graph is a graph whose topology and/or attributes change over time.
从动态图的定义中我们可以看出,边和节点的消失与增加、边特征和节点特征随时间的变化,这几种可能任意组合都是一种动态图。为此我们需要引入动态化程度(degree of dynamism)的概念:
理论上一个动态图,有四种可能的情况:
- 图的点集 和边集 都不变,记为。这种情况被很多文献称为"时空图"或"时空图" ( Spatial-Temporal Graphs,Spatio-Temporal Graphs,STGs);
- 不变但 变,指会动态地增加或删除,记为;
- 都变,记为;
- 不变但 变。由于一条边是基于一组节点而存在的,所以这种情况没意义。
动态图类型
连续时间动态图
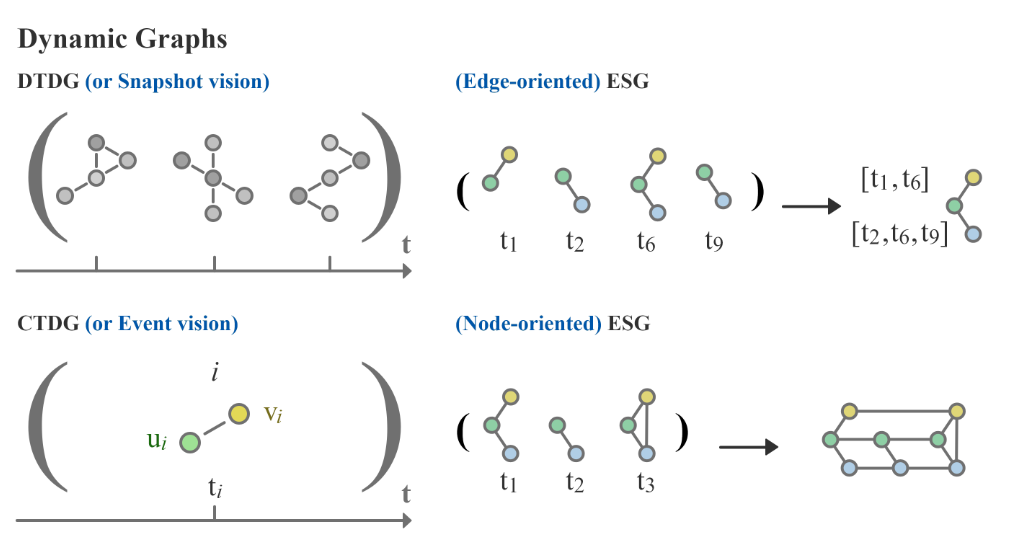
为了保留准确的时间信息,连续时间动态图 (Continuous Time Dynamic Graphs,CTDGs) 使用一组事件(Event)来表示动态图。
如文献 《Foundations and Modeling of Dynamic Networks Using Dynamic Graph Neural Networks: A Survey》 主要关注边的动态性,概述了三种典型的表示学习方法,它通过给定的一对节点 和时间 对事件进行表示:
- 表示 时刻两个节点 之间的瞬时交互;
- 表示 时刻两个节点 之间持续 时间的交互;
- 常用于大规模的图结构中,表示 时刻两个节点 之间的交互: 是增加、 是删除;
离散时间动态图
离散时间动态图 (Discrete-time dynamic graphs,DTDGs) 可以看作由 个静态图组成的序列,它们是动态图在不同时刻或时间窗口的快照 (snapshots)。
等效静态图
等效静态图 (Equivalent Static Graphs,ESGs) 的表示方法是构建一个单一的静态图用来表示一个动态图。近年来提出了几种构建ESG的方法,我们将其分为面向边(Edge-oriented)的和面向节点 (Node-oriented)的。
- Edge-oriented ESG 将图序列聚合成具有时间信息的静态图,编码为序列属性,也被称为 time-then-graph 的表示方法;
- Node-oriented ESG 在顶点出现的每个时刻构建顶点的副本,并定义节点在时间戳/事件之间的连接方式。进一步的细节将后文中继续讨论。
下图展示了以上三种类型的动态图示意:
模型架构
一种基本的时空图神经网络模型架构如下图所示。
- 数据处理模块(Data Processing Module,DPM):从原始数据中构建时空图数据;
- 时空图学习模块(Spatio-Temporal Graph Learning Module,STGLM):捕获复杂的社会系统中隐藏的时空依赖关系;
- 任务感知预测模块(Task-aware Prediction Module,TPM):将STGLM中的时空隐藏表示映射到下游预测任务的空间中。
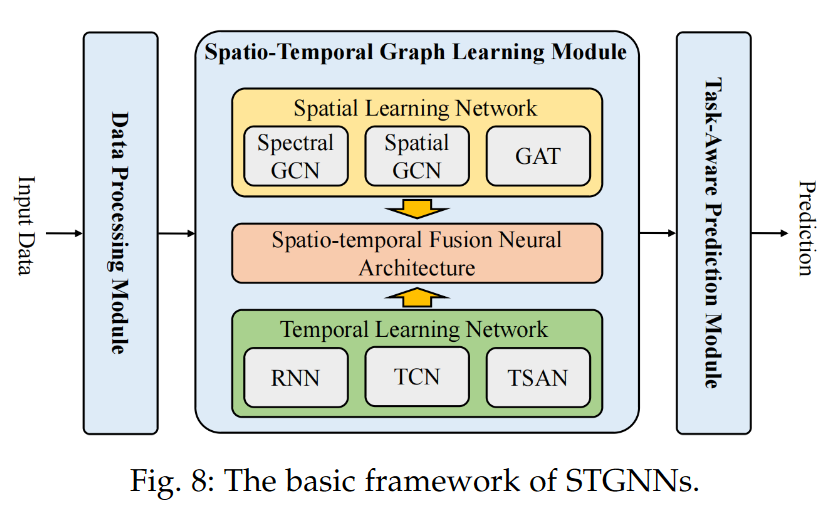
显然,STGLM 是 STGNN 中最关键的部分。可以看到这是一种十分自然的构思:将用于空间结构的网络和用于时间序列的网络进行融合。
其中,空间结构上的网络都是我们介绍过的谱域图卷积网络、空域图卷积网络、图注意力网络GAT等方法;而用于处理时间序列的网络也是我们学习过的网络:循环神经网络|RNN、时间卷积网络TCN、时间自注意力网络TSAN。
因此,STGLM 中最主要的就是如何将这两种网络融合起来,即时空融合架构(Spatio-temporal Fusion Neural Architecture)如何设计。
传统的融合神经架构可以分为两类:因子神经架构(Factorized Neural Architecture)和耦合神经架构(Coupled Neural Architecture)。
因子神经架构
在因子神经架构中,空间学习网络和时间学习网络模块一层一层并行或串行堆叠。两种典型的因子神经架构的模型分别是 STGCN 和 T-GCN。
STGCN
📑Spatio-Temporal Graph Convolutional Networks: A Deep Learning Framework for Traffic Forecasting
🧬官方TensorFlow实现: https://github.com/VeritasYin/STGCN_IJCAI-18
STGCN 输入 个时间步的图的特征向量 ( 表示输入通道/输入特征数, 表示节点数)以及对应的邻接矩阵 ,经过两个 和一个输出层,输出 ( 表示输出通道/输出特征数)来预测第 个时间步的节点特征。
具体来说,STGCN在时域上使用门控时间卷积网络,在空间上使用 ChebGCN,二者按三明治结构串联堆叠,形成一个,如下图所示。
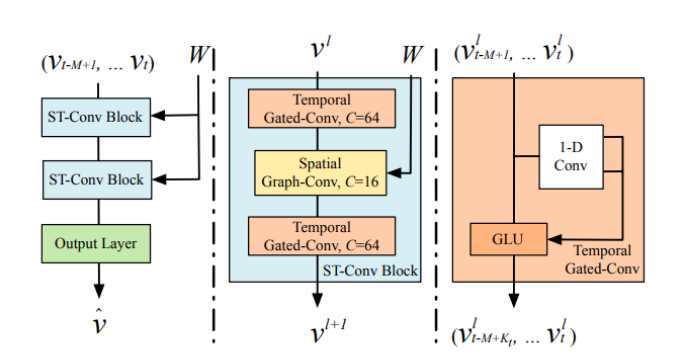
由于该模型通过卷积结构学习时间信息,所以其时空学习方法是并行的,即同时接收给定时间窗口长度 的所有信息作为输入。
作者受到GRU的启发,在 内再附加门控线性单元(Gated Linear Unit,GLU)以提高时间学习的能力。
具体来说,先是根据时间卷积的原理,设卷积核为 ,它实际上是由两组卷积核组成,每组内有 个卷积核(为了输出 个通道),两组卷积核分别对每一个节点特征 进行卷积得到两个结果 ,而 在论文中就是对 进行如下运算:
下面我们记 就是对输入进行上述卷积运算,记 为对输入进行 ChebGCN 运算(值得注意的是,该模型还对每次的图卷积增加了残差连接)。
最终,这个模型中每个 的计算可以定义如下:
经过有限个 和全连接层(Output Layer)之后, 的时间维度降到1,通道数映射到 ,此时 将其视为第 时间步的预测值,用 MSE 作为损失函数:
T-GCN
📑T-GCN: A Temporal Graph Convolutional Network for Traffic Prediction
🧬T-GCN及其丰富的变种: https://github.com/lehaifeng/T-GCN
T-GCN将图卷积网络(GCN)和门控循环单元(GRU)结合起来,先通过前者学习空间拓扑结构,再通过后者学习数据的时间特征。具体来说,就是将时间步 的一次卷积得到的表示作为 GRU在时间步 时的表示,直到所有时间步的前向传播结束。如下图所示:
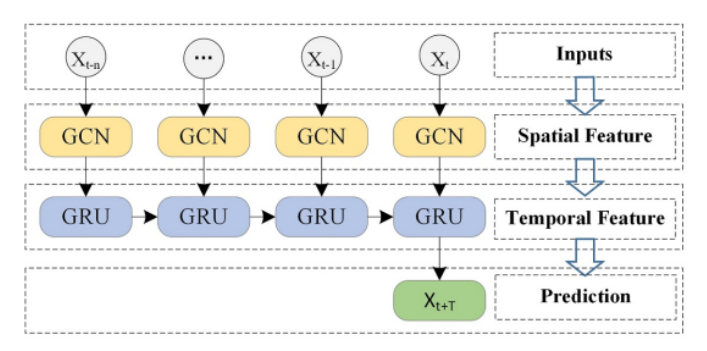
设 为根据邻接矩阵 和时间步 时的特征 进行一次 GCN 的输出结果,则对应的门控循环单元的计算如下: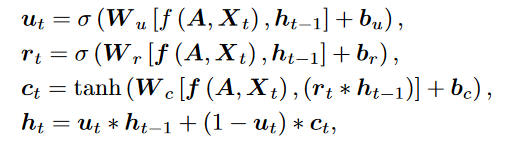
耦合神经架构
在耦合神经架构中,空间学习网络通常作为嵌入式组件集成到时间学习网络的架构中。在STGNN中,这种类型的神经结构几乎只出现在基于GNN的空间学习网络和基于RNN的时间学习网络的组合中。
DCRNN
📑Diffusion Convolutional Recurrent Neural Network: Data-Driven Traffic Forecasting
🧬官方TensorFlow实现: https://github.com/liyaguang/DCRNN
DCRNN 使用双向随机游走来对空间依赖进行建模,使用encoder-decoder架构来对时间依赖进行建模,并在交通数据集 METR-LA 和 PEMS-BAY 上进行了测试,取得了很好的效果。
我们知道图上的扩散过程(也是随机游走过程)具体到有向图上是单向的。不过根据这篇论文的实际应用,作者考虑到使用两种方向的扩散过程(其实就是分别使用不同的权重)。然后使用空域图卷积中的扩散卷积方法进行空间依赖的捕捉,即定义卷积操作:
其中, 是扩散步数, 分别表示入度和出度矩阵,为加权邻接矩阵, 为根据出度得到的正向概率转移矩阵, 为根据入度得到的反向概率转移矩阵, 表示参数为 的卷积算子。
假设输入通道/特征数为,输出通道数为,那么卷积层的操作可以定义为:
上面我们阐述了双向扩散卷积算子的运算过程,以及对应的图扩散卷积层的运算过程。接下来介绍的是 DCRNN 是如何运用上述卷积操作的。
DCRNN 将上一时间步得到的空间信息表示 与当前时间步的输入特征 结合起来共同作为GRU的特征,并且把GRU中的原始线性单元用图扩散卷积算子取代。该模块称为 DCGRU。
在多步预测中,作者使用 Sequence to Sequence 架构。编码解码器都是 DCGRU。
- 训练时,把历史的时间序列放到编码器,使用编码器输出的最终状态初始化解码器。解码器生成预测结果。
- 测试时,ground truth 替换成模型本身生成的预测结果。
由于训练和测试输入的分布的差异会导致性能的下降,所以为了减轻这个问题的影响,作者使用了 scheduled sampling (Bengio et al., 2015),在训练的第 轮时,模型的输入要么是概率为 的 ground truth,要么是概率为 的预测结果。在训练阶段, 逐渐的减小为0,使得模型可以学习到测试集的分布。
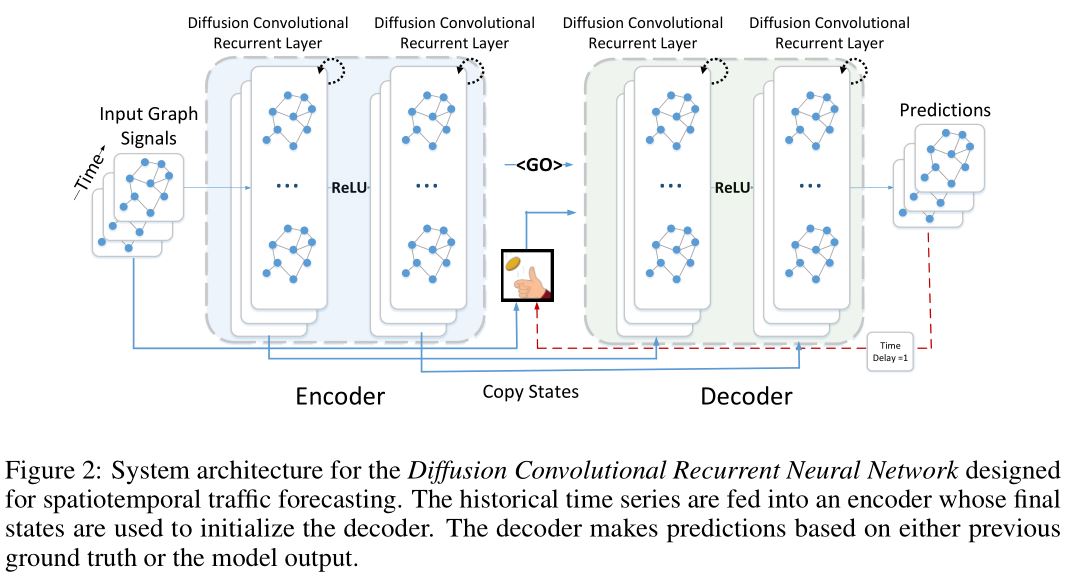
上图展示了 DCRNN 的架构。整个网络通过 BPTT 循环生成目标时间序列的最大似然得到。DCRNN 可以捕获时空依赖关系,应用到多种时空预测问题上。
EvolveGCN
- 【用GRU来学习GCN参数的新颖方法】EvolveGCN: Evolving Graph Convolutional Networks for Dynamic Graphs | 中文总结
Other Recurrent GCN
- 【提出因子型和耦合型两种架构】Structured Sequence Modeling with Graph Convolutional Recurrent Networks | 中文总结
- 【使用GCN+LSTM做图结构预测】 GC-LSTM: Graph Convolution Embedded LSTM for Dynamic Link Prediction | 中文总结
- 【GGNNs+LSTM做表示学习】 Learning to Represent the Evolution of Dynamic Graphs with Recurrent Models | 中文总结
- 【加入注意力机制的T-GCN】 A3T-GCN: Attention Temporal Graph Convolutional Network for Traffic Forecasting | 中文总结
- 【自适应GCN+GRU+独立参数】 Adaptive Graph Convolutional Recurrent Network for Traffic Forecasting | 中文总结
Other Attention Aggregated STGNN
- 【三分支多粒度学习+时空注意力】Attention Based Spatial-Temporal Graph Convolutional Networks for Traffic Flow Forecasting | 中文总结
- 【STAEformer:自适应+时空Transformer】STAEformer: Spatio-Temporal Adaptive Embedding Makes Vanilla Transformer SOTA for Traffic Forecasting | 中文总结
- 【PDFormer:延迟感知+多尺度注意力】PDFormer: Propagation Delay-aware Dynamic Long-range Transformer for Traffic Flow Prediction | 中文总结